Dead reckoning
The following notebook contains a simple implementation of dead reckoning with the Explicit and Implicit Euler Method for a bi-cycle given the steering angle and velocity at every timestep t.
import math
import numpy as np
import matplotlib.pyplot as plt
Explicit Euler Method
\(X_{k+1} = X_{k} + T \cdot X_{k}'\) where T is the discretization step size.
The derivative can be approximated by a circular path around the instant center of rotation “ICR”). \(X_{k}' = ( v \cdot cos(\theta_k) , v \cdot sin(\theta_k) , v \cdot \frac{tan(\alpha_t)}{l})^T\)
def explicit_euler(length, t_end, T, X_start, v_func, alpha_func):
# explicit euler
explicits = [X_start]
t_steps = int(math.ceil((t_end - 0.0) / T))
for i in range(t_steps):
# velocity and steer at time i
v_k = v_func(i)
alpha_k = alpha_func(i) if alpha_func(i) != 0 else 0.00001
R = length / math.tan(alpha_k)
# old X and derivative of old X
x_k, y_k, theta_k = explicits[-1]
x_dot = v_k * np.array([math.cos(theta_k), math.sin(theta_k), 1/R])
# store values and norm angles only between 0 and 2 pi
explicits += [ explicits[-1] + T * x_dot]
explicits[-1][2] %= 2*math.pi
np_explicits = np.array(explicits)
return np_explicits
Implicit Euler Method
\(X_{k+1} = X_{k} + T \cdot X_{k+1}'\) yields system of linear equations.
- \[x_{k+1} = x_{k} + T \cdot v \cdot cos(\theta_{k+1})\]
- \[y_{k+1} = y_{k} + T \cdot v \cdot sin(\theta_{k+1})\]
- \[\theta_{k+1} = \theta_{k} + T \cdot v \cdot 2 \cdot tan(\alpha_{k+1})\]
The third equation yields $ \theta_{k+1} $ which can be inserted into the first and second.
def implicit_euler(length, t_end, T, X_start, v_func, alpha_func):
implicits = [X_start]
t_steps = int(math.ceil((t_end - 0.0) / T))
for i in range(t_steps):
# old state
x_k, y_k, theta_k = implicits[-1]
# next control variables
alpha_k_plus_1 = alpha_func(i+1)
v_k_plus_1 = v_func(i+1)
# X_k+1
theta_k_plus_1 = theta_k + T * v_k_plus_1 * 2 * math.tan(alpha_k_plus_1)
x_k_plus_1 = x_k + T * v_k_plus_1 * math.cos(theta_k_plus_1)
y_k_plus_1 = y_k + T * v_k_plus_1 * math.sin(theta_k_plus_1)
# store values and norm angles only between 0 and 2 pi
implicits += [ np.array([x_k_plus_1, y_k_plus_1, theta_k_plus_1]) ]
implicits[-1][2] %= 2*math.pi
np_implicits = np.array(implicits)
return np_implicits
def visualize_state_sequence(Xs):
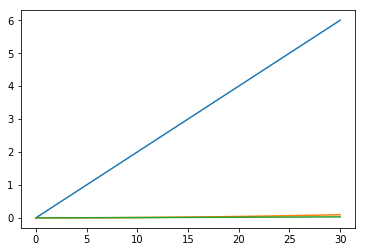
plt.plot(range(Xs.shape[0]), Xs)
plt.show()
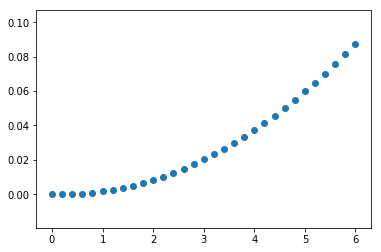
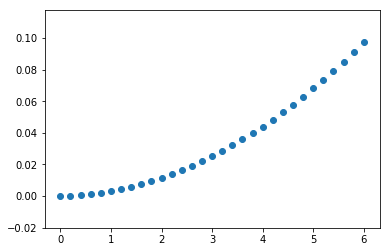
plt.scatter(Xs[:, [0]], Xs[:, [1]])
plt.show()
Test the functions
Assume a constant velocity and a stair function for steering angles.
# command variables
def v(t):
return 2
def alpha(t):
if t == 0:
return 0.001
if 1 < t < 2:
return 0.3 * math.pi / 180.0
return 0.15 * math.pi / 180.0
x1 = explicit_euler(length=0.5, t_end=3.0, T=0.1, X_start=np.zeros(3), v_func=v, alpha_func=alpha)
visualize_state_sequence(x1)
x2 = implicit_euler(length=0.5, t_end=3.0, T=0.1, X_start=np.zeros(3), v_func=v, alpha_func=alpha)
visualize_state_sequence(x2)
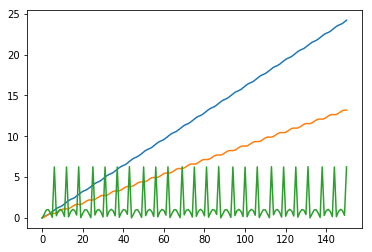
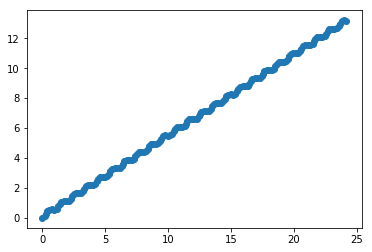
x3 = explicit_euler(length=0.5, t_end=15.0, T=0.1, X_start=np.zeros(3), v_func=v, alpha_func=math.sin)
visualize_state_sequence(x3)
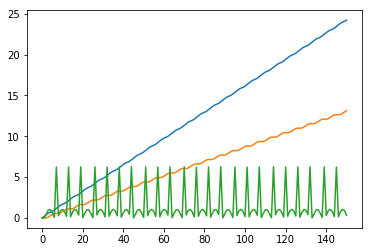
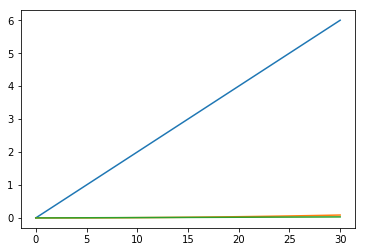
x4 = implicit_euler(length=0.5, t_end=15.0, T=0.1, X_start=np.zeros(3), v_func=v, alpha_func=math.sin)
visualize_state_sequence(x4)