Pypcd
Handling point cloud .pcd files with python. The point cloud library develops its own format called PCD (Point Cloud Data). Details can be found here.
If I want to process the 3d data stored in pcd with python I have got two options:
- Build python-pcl which has to be linked to a PCL version because it is a wrapper for the point cloud library or
- use the Pypi package pypcd which can read pcd, make the data available as a numpy array and from there write to a .pcd file again.
Like the post title already says I am going to explain how to use pypcd step by step in the following few lines of code.
Installing pypcd for python2
# Install pypcd for the current python version of the kernel
import sys
!{sys.executable} -m pip install --user pypcd
# Import the package and print the current version
import pypcd
print(pypcd.__version__)
0.1.1
Installing pypcd for python3
If you are using python3.5 or python3.6 you are going to run into the following error when trying to work with pypcd:
Python 3.6.5 (default, Mar 29 2018, 03:28:50)
[GCC 5.4.0 20160609] on linux
Type "help", "copyright", "credits" or "license" for more information.
>>> import pypcd
>>> pc = pypcd.PointCloud.from_path('cloud.pcd')
Traceback (most recent call last):
File "<stdin>", line 1, in <module>
AttributeError: module 'pypcd' has no attribute 'PointCloud'
The problem is resolved in the following fork of pypcd for python3:
https://github.com/DanielPollithy/pypcd
Follow the next steps to install a version of pypcd which was fixed to be compatible with Python3.X:
- Install pypcd from github
python3.6 -m pip install --user git+https://github.com/DanielPollithy/pypcd.git
- Change the import statement
from pypcd import pypcd
PCD format
The pcd file format as described here looks like the following:
# .PCD v.7 - Point Cloud Data file format
VERSION .7
FIELDS x y z rgb
SIZE 4 4 4 4
TYPE F F F F
COUNT 1 1 1 1
WIDTH 213
HEIGHT 1
VIEWPOINT 0 0 0 1 0 0 0
POINTS 213
DATA ascii
0.93773 0.33763 0 4.2108e+06
0.90805 0.35641 0 4.2108e+06
0.81915 0.32 0 4.2108e+06
0.97192 0.278 0 4.2108e+06
0.944 0.29474 0 4.2108e+06
0.98111 0.24247 0 4.2108e+06
0.93655 0.26143 0 4.2108e+06
0.91631 0.27442 0 4.2108e+06
[...]
In the current directory the file cloud.pcd contains an example of such a cloud.
# load cloud.pcd
cloud = pypcd.PointCloud.from_path('cloud.pcd')
# fancy: import pretty print to visualize dicts better
import pprint
# pretty print the meta data of the PCD
pprint.pprint(cloud.get_metadata())
{'count': [1, 1, 1, 1],
'data': 'ascii',
'fields': ['x', 'y', 'z', 'rgb'],
'height': 1,
'points': 213,
'size': [4, 4, 4, 4],
'type': ['F', 'F', 'F', 'F'],
'version': '.7',
'viewpoint': [0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0],
'width': 213}
- count stands for the number of dimensions for every field (for example the x field only consists of one number -> only one dimension)
- data describes the way the points are stored. There are the options ascii (which we use in this post) and binary compressed
- height: if set to 1 the loaded point cloud is unorganized. Else the pointcloud is organized 3d-row by 3d-row (and height is the number of rows)
- points: the number of points/rows in the file
- size: the number of bytes for every column (example column x needs 4 bytes to store unsigned int/int/float)
- type: as which data type should the column be interpreted? F = float, u = unsigned types (uchar, ushort, uint), I = integer (int8 char, int16 short, int32 int)
- version: PCL version
- viewpoint: the position and orientation of the camera
- width: if cloud is not organized then width=points else width is the total number of points in a row
# access the point cloud as a numpy structured array
# print the first 10 rows
cloud.pc_data[:10]
array([(0.93773, 0.33763, 0., 4210800.), (0.90805, 0.35641, 0., 4210800.),
(0.81915, 0.32 , 0., 4210800.), (0.97192, 0.278 , 0., 4210800.),
(0.944 , 0.29474, 0., 4210800.), (0.98111, 0.24247, 0., 4210800.),
(0.93655, 0.26143, 0., 4210800.), (0.91631, 0.27442, 0., 4210800.),
(0.81921, 0.29315, 0., 4210800.), (0.90701, 0.24109, 0., 4210800.)],
dtype=[('x', '<f4'), ('y', '<f4'), ('z', '<f4'), ('rgb', '<f4')])
# only access a specific column (here the z-column)
print(cloud.pc_data['z'])
[0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0.
0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0.
0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0.
0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0.
0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0.
0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0.
0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0.
0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0.
0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0.]
# Aha! Obviously the z-column of this file is not really necessary.
# Let's create a copy of the loaded cloud
new_cloud_data = cloud.pc_data.copy()
# we need numpy now
import numpy as np
# convert the structured numpy array to a ndarray
new_cloud_data = cloud.pc_data.view(np.float32).reshape(cloud.pc_data.shape + (-1,))
# print the shape of the new array
print(new_cloud_data.shape)
# print the first 10 rows
print(new_cloud_data[:10])
(213, 4)
[[9.3773e-01 3.3763e-01 0.0000e+00 4.2108e+06]
[9.0805e-01 3.5641e-01 0.0000e+00 4.2108e+06]
[8.1915e-01 3.2000e-01 0.0000e+00 4.2108e+06]
[9.7192e-01 2.7800e-01 0.0000e+00 4.2108e+06]
[9.4400e-01 2.9474e-01 0.0000e+00 4.2108e+06]
[9.8111e-01 2.4247e-01 0.0000e+00 4.2108e+06]
[9.3655e-01 2.6143e-01 0.0000e+00 4.2108e+06]
[9.1631e-01 2.7442e-01 0.0000e+00 4.2108e+06]
[8.1921e-01 2.9315e-01 0.0000e+00 4.2108e+06]
[9.0701e-01 2.4109e-01 0.0000e+00 4.2108e+06]]
# That looks good! Now we can delete the z-column and rgb-column.
# Because for the first step we don't need them.
new_cloud_data = np.delete(new_cloud_data, [2, 3], axis=1)
%matplotlib inline
# Now visualize the points with matplotlib
import matplotlib.pyplot as plt
# set the size of pyplot charts
plt.rcParams['figure.figsize'] = (14, 6)
# plot the points of the columns
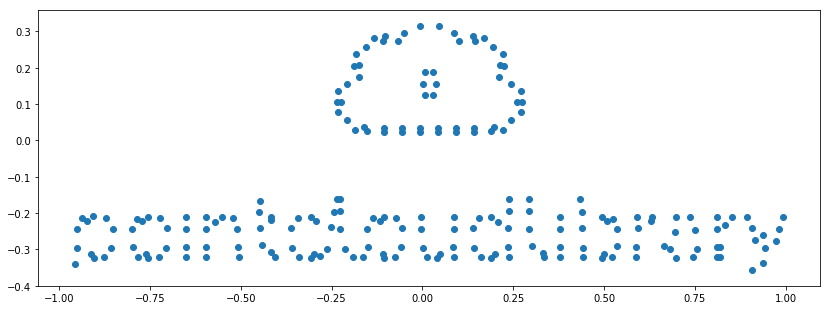
plt.scatter(new_cloud_data[:, [0]], new_cloud_data[:, [1]])
# scale the axis equally
# (Note: append a semicolon to your last line to prevent jupyter notebook
# from outputting your last cell's content)
plt.axis('scaled');
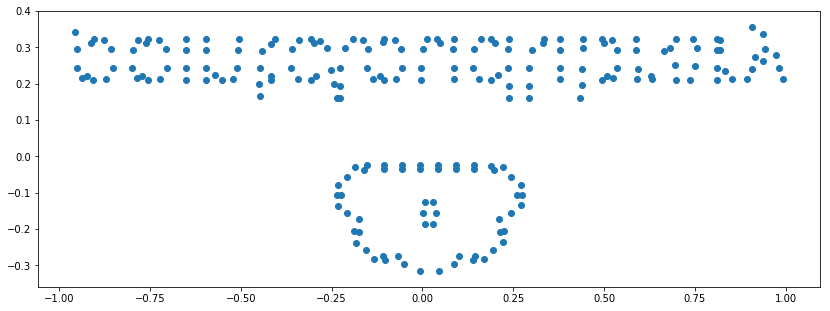
# Aha! It's the point cloud logo. But we have to flip it vertically.
# A minus applied to the y-data should be enough.
plt.scatter(new_cloud_data[:, [0]], -new_cloud_data[:, [1]])
plt.axis('scaled');
# So far so good. But what about the rgb column?
# How to access the stored color values?
# First of all we get all columns again
new_cloud_data = cloud.pc_data.view(np.float32).reshape(cloud.pc_data.shape + (-1,))
# And print some sample form the rgb column
print(new_cloud_data[:100, [3]]).reshape(1, -1)
[[4210800. 4210800. 4210800. 4210800. 4210800. 4210800. 4210800. 4210800.
4210800. 4210800. 4210800. 4210800. 4210800. 4210800. 4210800. 4210800.
4210800. 4210800. 4210800. 4210800. 4210800. 4210800. 4210800. 4210800.
4210800. 4210800. 4210800. 4210800. 4210800. 4210800. 4210800. 4210800.
4210800. 4210800. 4210800. 4210800. 4210800. 4210800. 4210800. 4210800.
4210800. 4210800. 4210800. 4210800. 4210800. 4210800. 4210800. 4210800.
4808000. 4210800. 4210800. 4210800. 4210800. 4808000. 4210800. 4808000.
4808000. 4808000. 4808000. 4808000. 4808000. 4808000. 4808000. 4808000.
4808000. 4808000. 4808000. 4210800. 4210800. 4808000. 4210800. 4808000.
4808000. 4808000. 4808000. 4808000. 4808000. 4808000. 4808000. 4808000.
4808000. 4808000. 4808000. 4808000. 4808000. 4808000. 4808000. 4808000.
4808000. 4808000. 4808000. 4808000. 4808000. 4808000. 4808000. 4808000.
4808000. 4808000. 4808000. 4808000.]]
Info:
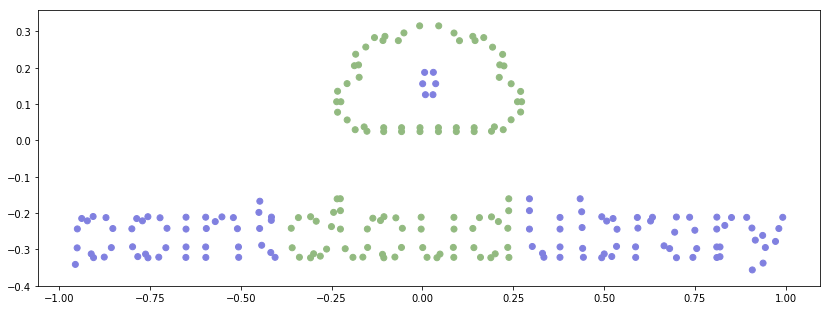
The PCL stores rgb in packed 32 bit floats. Pypcd comes with a method called decode_rgb_from_pcl which takes a cloud as input, searches for a field called “rgb” and splits the values accordingly to three new columns of type uint8.
Of course there is also an “inverse” to this operation called encode_rgb_for_pcl.
# split the rgb column into three columns: red, green and blue
rgb_columns = pypcd.decode_rgb_from_pcl(cloud.pc_data['rgb'])
# normalize the rgb values (they should be between [0, 1])
rgb_columns = (rgb_columns / 255.0).astype(np.float)
# Let's check the values...
print(rgb_columns[:5])
[[0.50196078 0.50196078 0.87843137]
[0.50196078 0.50196078 0.87843137]
[0.50196078 0.50196078 0.87843137]
[0.50196078 0.50196078 0.87843137]
[0.50196078 0.50196078 0.87843137]]
# Plot again with color
plt.scatter(new_cloud_data[:, [0]], -new_cloud_data[:, [1]], color=rgb_columns)
plt.axis('scaled');
Generate a new point cloud
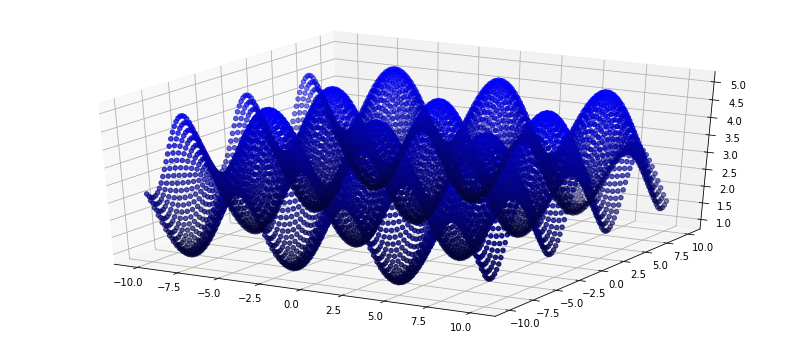
Now that we have seen how to load, alter and visualize in 2d, I am going to create a synthetic data set, visualize it in 3d and then save the file to disk.
# generate a 3d data set containing waves like the sea
# more or less ;)
# generate a grid of numbers for x and z
x = np.linspace(-10, 10, num=100)
z = np.linspace(-10, 10, num=100)
xx, zz = np.meshgrid(x, z)
# calculate "waves" for the grid
yy = np.sin(xx) + np.cos(zz) + 3
# flatten the arrays
xx = xx.astype(np.float32).reshape(1, -1)
yy = yy.astype(np.float32).reshape(1, -1)
zz = zz.astype(np.float32).reshape(1, -2)
# the number of points
n = yy.size
# Generate different blue values depending on the y value
blue = (yy/np.max(yy))
# Make rgb columns for every point
rgb = np.hstack((np.repeat(0.01, n)[:, np.newaxis], np.repeat(0.01, n)[:, np.newaxis], blue.T))
# peek into the data
print(rgb[:10])
[[0.01 0.01 0.54140681]
[0.01 0.01 0.50549465]
[0.01 0.01 0.46661434]
[0.01 0.01 0.42634723]
[0.01 0.01 0.38633114]
[0.01 0.01 0.34819368]
[0.01 0.01 0.31348598]
[0.01 0.01 0.28361979]
[0.01 0.01 0.25980985]
[0.01 0.01 0.24302459]]
from mpl_toolkits.mplot3d import Axes3D
# Create a figure with a subplot with three axes
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
ax.scatter(xx, zz, yy, color=rgb);

# Next step: Store the new points in a pcd file
# Encode the colors (distinct red, green and blue color columns => one single column)
encoded_colors = pypcd.encode_rgb_for_pcl((rgb * 255).astype(np.uint8))
# hstack the X, Y, Z, RGB columns
new_data = np.hstack((xx.T, yy.T, zz.T, encoded_colors[:, np.newaxis]))
# Use the pypcd utility function to create a new point cloud from ndarray
new_cloud = pypcd.make_xyz_rgb_point_cloud(new_data)
# pretty print the new metadata
pprint.pprint(new_cloud.get_metadata())
{'count': [1, 1, 1, 1],
'data': 'binary',
'fields': ['x', 'y', 'z', 'rgb'],
'height': 1,
'points': 10000,
'size': [4, 4, 4, 4],
'type': ['F', 'F', 'F', 'F'],
'version': 0.7,
'viewpoint': [0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0],
'width': 10000}
# Store the cloud uncompressed
new_cloud.save('new_cloud.pcd')
ls -la in the directory says that the file was created. less new_cloud.pcd:
VERSION 0.7
FIELDS x y z rgb
SIZE 4 4 4 4
TYPE F F F F
COUNT 1 1 1 1
WIDTH 10000
HEIGHT 1
VIEWPOINT 0.0 0.0 0.0 1.0 0.0 0.0 0.0
POINTS 10000
DATA ascii
-10.0000000000 2.7049496174 -10.0000000000 0.0000000000
-9.7979793549 2.5255272388 -10.0000000000 0.0000000000
-9.5959596634 2.3312752247 -10.0000000000 0.0000000000
-9.3939390182 2.1300947666 -10.0000000000 0.0000000000
-9.1919193268 1.9301683903 -10.0000000000 0.0000000000
-8.9898986816 1.7396278381 -10.0000000000 0.0000000000
-8.7878789902 1.5662230253 -10.0000000000 0.0000000000
-8.5858583450 1.4170070887 -10.0000000000 0.0000000000
[...]
Let’s install another tool (for example Meshlab) in order to verify that the point cloud is not corrupted. Installation of Meshlab:
sudo apt-add-repository ppa:zarquon42/meshlab
sudo apt-get update
sudo apt-get install meshlab
And voila: The waves are there. Although I have to admit that the colors are missing. I guess that it is a rounding error (which results in the last column to be only zeros) but I am not quite sure.